探査計画に基づく月面環境対応小型探査ロボットの実現
探査計画に基づく月面環境対応小型探査ロボットの実現

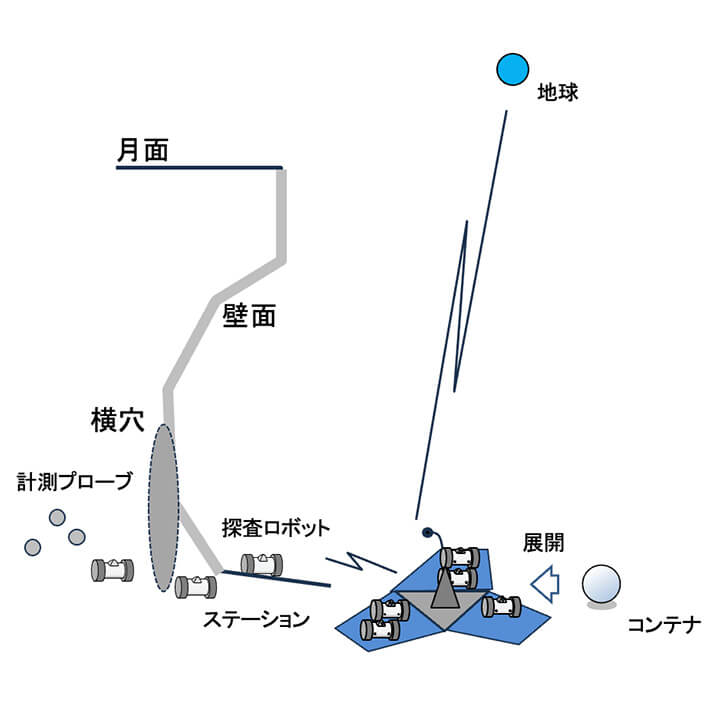
月ミッション計画に沿って探査システムの仕様を決め、そのシステムの設計および宇宙環境試験等を実施し、月面ミッションで使用可能な探査システムを実現します。
探査システムは、投入カプセル(コンテナ)と、その内部に格納した小型探査ロボットから構成され、このカプセルごと着陸機へ搭載します。月面に投入されたカプセルは溶岩ドーム内で展開し、ロボットを放出した後は外部との通信中継のステーションなどの機能を担うことになります。


研究者
-

國井 康晴
中央大学 理工学部 教授
-
新妻 実保子
中央大学 理工学部 教授
-
田口 善弘
中央大学 理工学部 教授
-
石井 慶子
中央大学 理工学部 准教授
-
坂本 康輔
中央大学 研究開発機構 機構准教授
-
鈴木 大和
中央大学 研究開発機構 機構助教
-
安藤 慶昭
産業技術総合研究所 インダストリアルCPS研究センター 研究センター付
-
宮本 信彦
産業技術総合研究所 インダストリアルCPS研究センター 研究員
-
吉光 徹雄
宇宙航空研究開発機構 宇宙科学研究所 宇宙機応用工学研究系 教授
-
大槻 真嗣
宇宙航空研究開発機構 宇宙科学研究所 宇宙機応用工学研究系 准教授
-

冨木 淳史
宇宙航空研究開発機構 宇宙科学研究所 宇宙機応用工学研究系 准教授
-
宇佐美 尚人
宇宙航空研究開発機構 宇宙科学研究所 宇宙機応用工学研究系 助教
-
前田 孝雄
東京農工大学 工学部 准教授
-
川嶋 宏彰
兵庫県立大学 情報科学研究科 教授