小型RT表面移動機構の設計と搭載実現
小型RT表面移動機構の設計と搭載実現

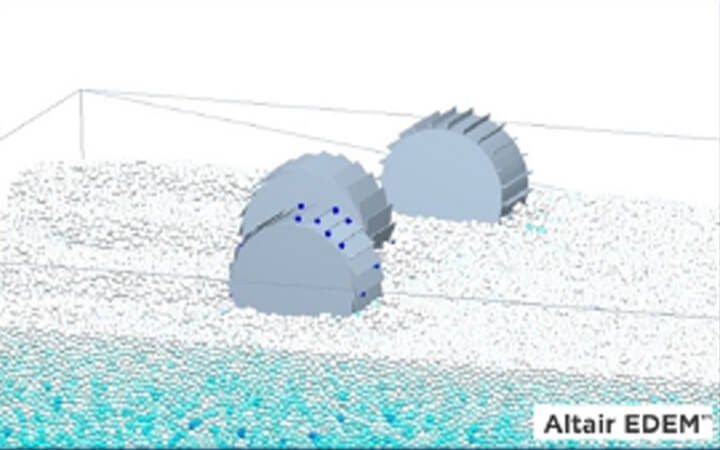
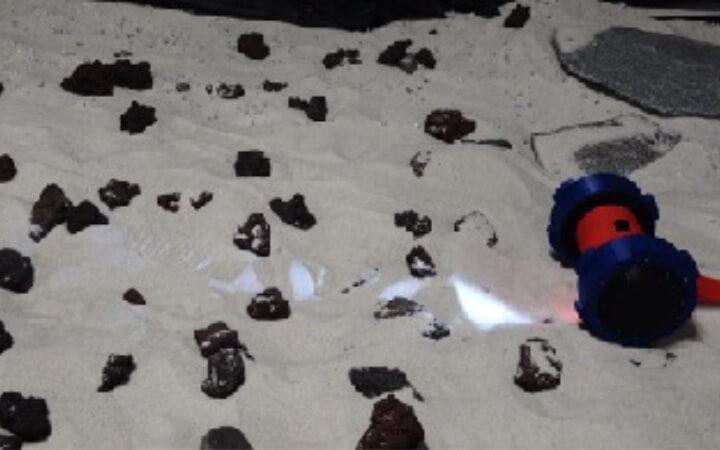
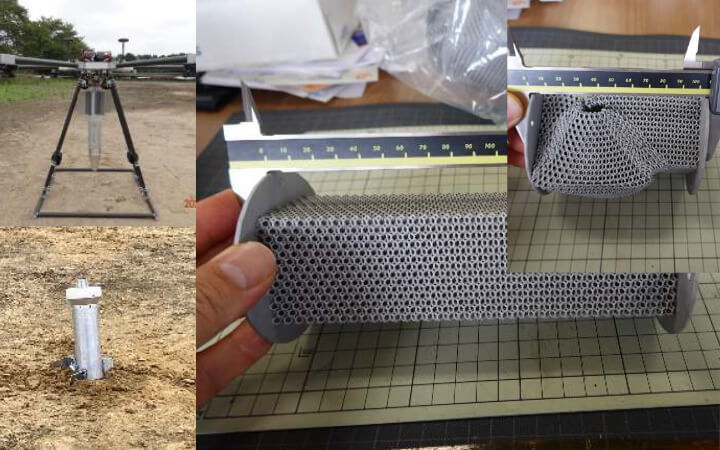
月面の溶岩チューブで想定される不整地地形において活動する小型ロボットに搭載可能な表面移動メカニズムを、テラメカニクスの観点、消費電力、搭載容積・重量などを考慮して研究開発していきます。
これを小型ロボットに実装していき、群協調型コンテナへのロボットの格納展開方式や、月面への投入機能なども研究開発し、月探査ミッションのためのロボット機体を開発します。
研究者
-

吉光 徹雄
宇宙航空研究開発機構 宇宙科学研究所 宇宙機応用工学研究系 教授
-
大槻 真嗣
宇宙航空研究開発機構 宇宙科学研究所 宇宙機応用工学研究系 准教授
-

冨木 淳史
宇宙航空研究開発機構 宇宙科学研究所 宇宙機応用工学研究系 准教授
-
宇佐美 尚人
宇宙航空研究開発機構 宇宙科学研究所 宇宙機応用工学研究系 助教