 小型RT跳躍機構の設計と搭載実現
小型RT跳躍機構の設計と搭載実現

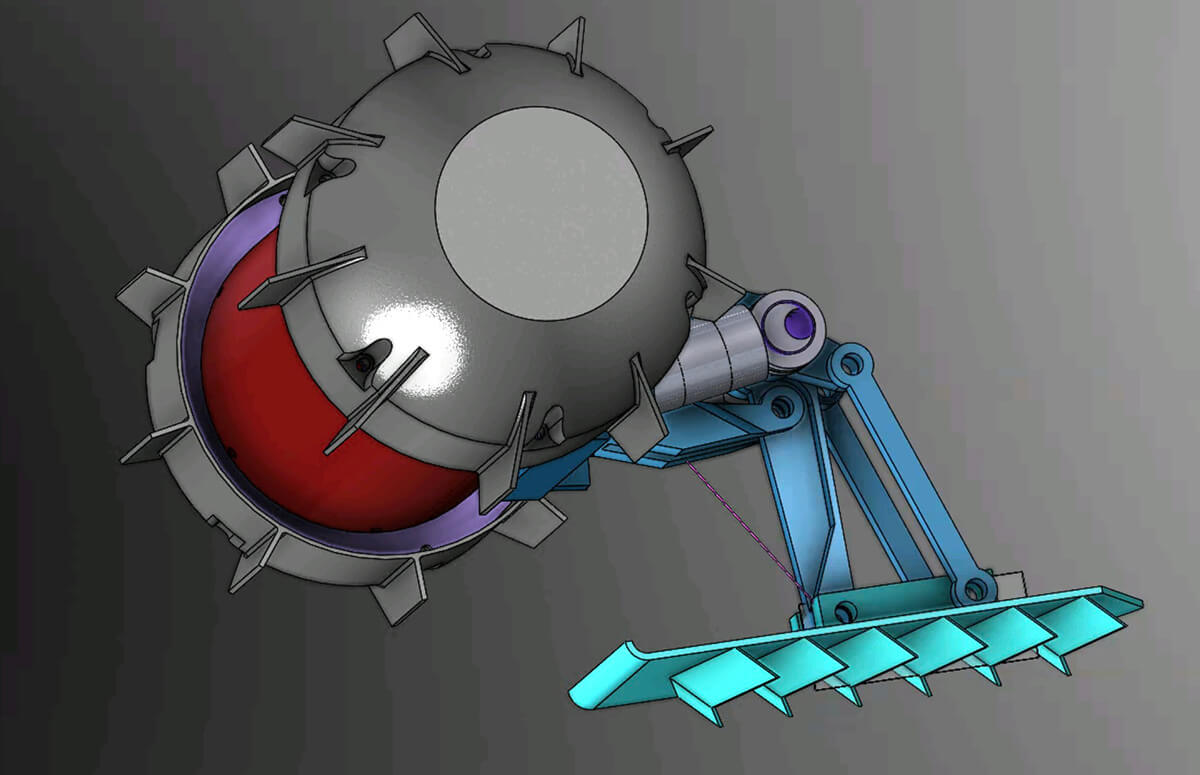
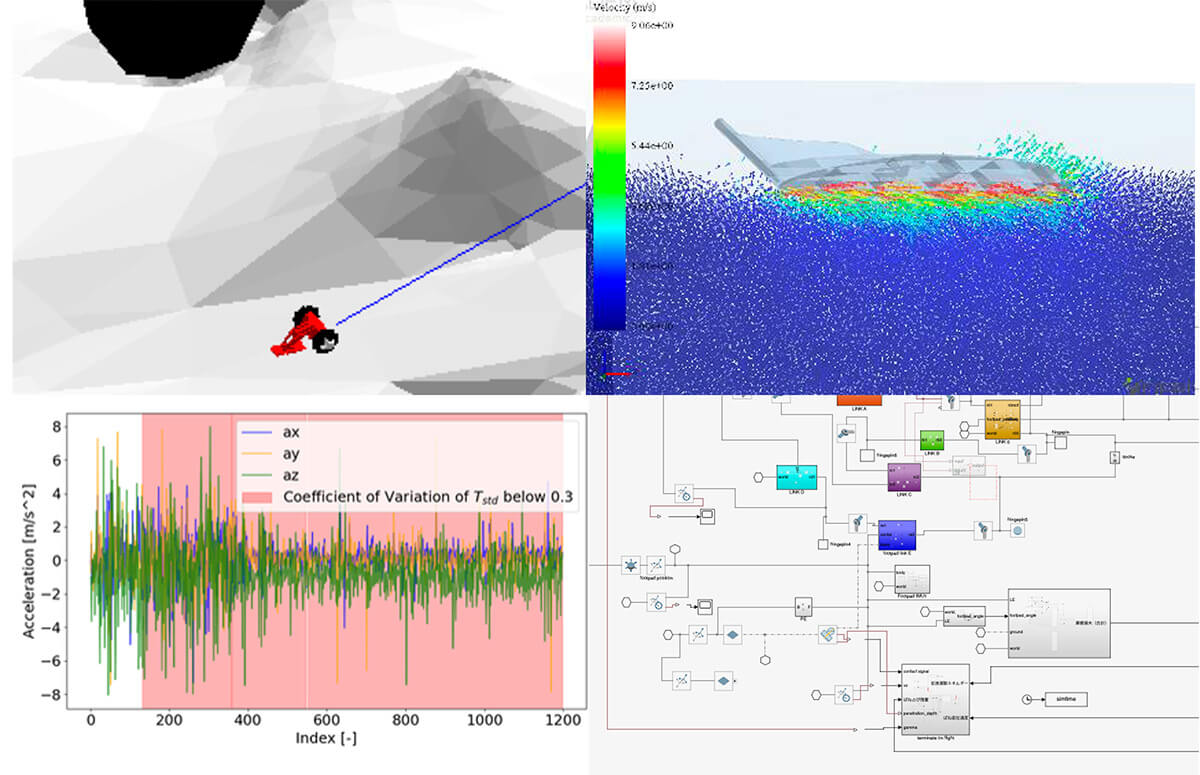
開発する小型軽量なロボットは環境等とのスケール比でみると相対的に不整地移動能力が低下しています。これを補うため、小型ロボットに搭載可能な跳躍機構を、消費エネルギー、テラメカニクスからの効果などを考慮した研究開発を通じて機械システムとして実現します。
さらに、ロボットをコンテナへ格納展開する方式、エアバック等を利用したコンテナおよびロボットの現地への投入機能なども研究開発していきます。

研究者
-

前田 孝雄
東京農工大学 工学部 准教授
