 探査・輸送・建築機能を有するRTプラットフォームの統合実現
探査・輸送・建築機能を有するRTプラットフォームの統合実現

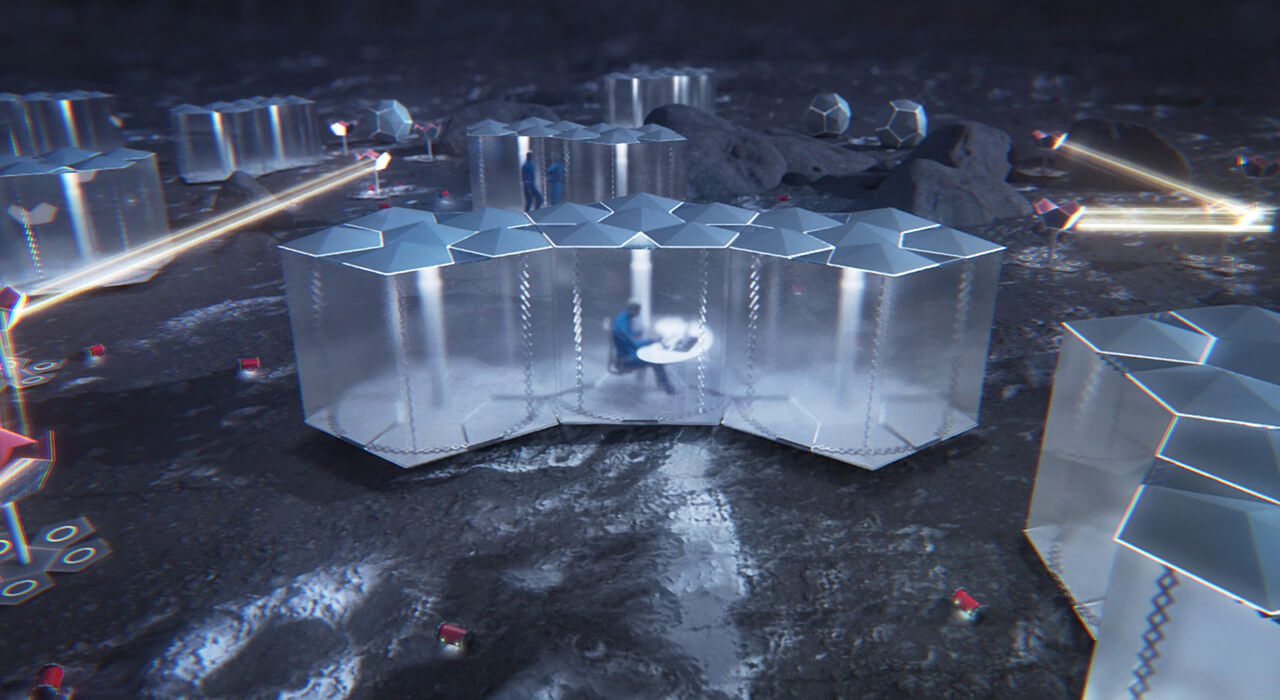
小型作業ロボットが、月の溶岩チューブ内部で探査、調査、搬送作業ができるように、輸送コンテナとの作業連携や協働の機能などを研究開発します。
このコンテナには、拠点や通信・電力中継などのペイロードを格納展開し、それを各種機能を設置する機能、ロボット群の格納と落下投入の機能、ロボット群に対して情報または物理的な移動の支援を可能にする協働機能を持たせます。そして、ロボット自身の持つ各種装置を統合したシステムとして開発します。


研究者
-

宮口 幹太
(株)竹中工務店 技術研究所 主席研究員
-
髙井 勇志
(株)竹中工務店 技術研究所 主席研究員
-
稲葉 澄
(株)竹中工務店 技術研究所 研究主任
-
井戸硲 勇樹
(株)竹中工務店 技術研究所 研究主任
-
北野 信吾
(株)竹中工務店 技術研究所 主席研究員
-
岡田 拓郎
(株)竹中工務店 技術研究所 研究主任





