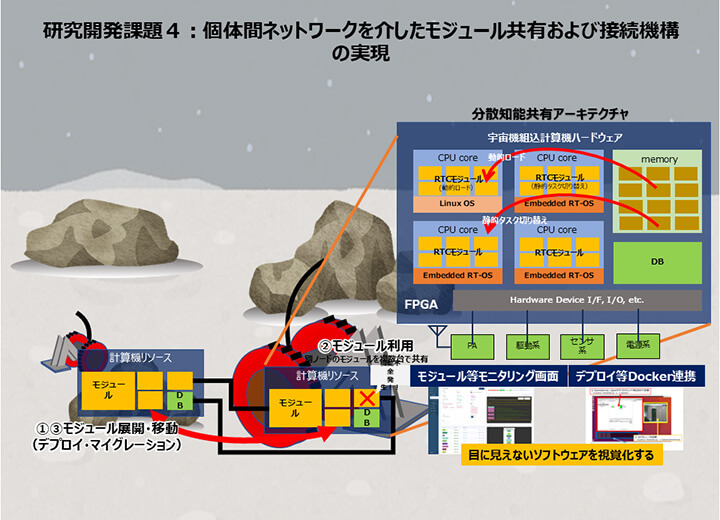
 個体間ネットワークを介したモジュール共有および接続機構の実現
個体間ネットワークを介したモジュール共有および接続機構の実現

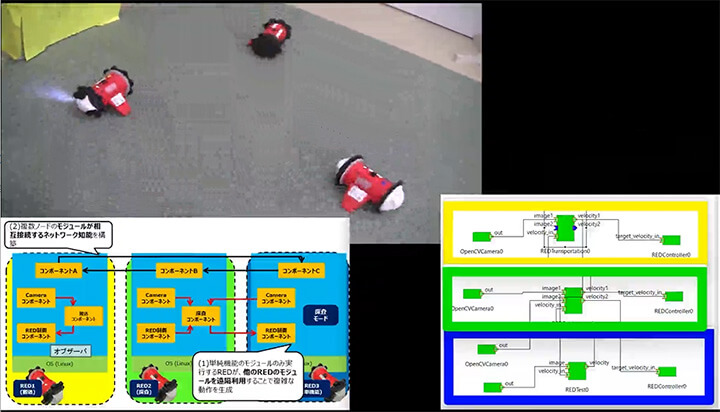
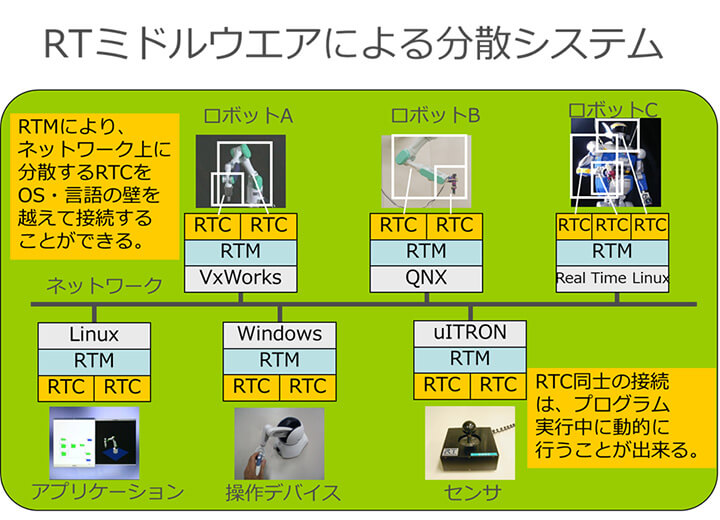
通信遅延や情報欠落が生じる未知環境での機能モジュールの接続および動作情報の非同期状態などへ対応できるように、ネットワーク上でのデータ管理機構およびデータフローの制御機能を開発し、共有ネットワーク上に「ネットワーク知能」を搭載するための基盤技術を確立します。
そして、ロボット個体および群の相互間の物理的な距離、ネットワーク強度、通信状況などを考慮した各個体への動的なモジュール割り付けとそのロバスト化を実現します。
研究者
-

安藤 慶昭
産業技術総合研究所 インダストリアルCPS研究センター 研究センター付
-
宮本 信彦
産業技術総合研究所 インダストリアルCPS研究センター 研究員

