高粒度タスク化のためのデータフロー制御による個体進化・群共進化機能の実現
高粒度タスク化のためのデータフロー制御による個体進化・群共進化機能の実現

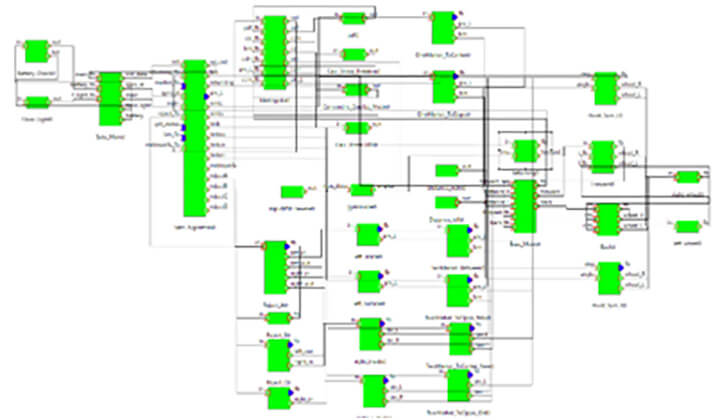
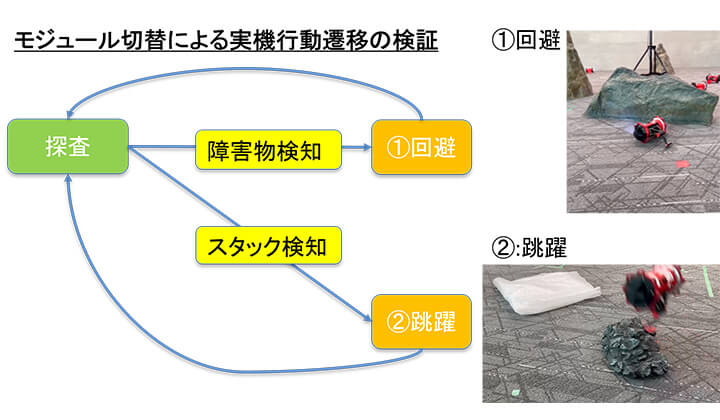
ロボット個体内および群内で、モジュール間の接続データの制御や接続の変更・追加・削除等のデータフロー制御をソフトウェアやシミュレータ上で検討・設計し、ハードウェア層と統合して進化型制御装置を開発します。
また、個体ロボット、群、「ネットワーク知能」の各機能や共有データの管理運用ソフトウェア環境に、AI技術、ヒューマンインタフェース技術、GUIなどによる支援機能を実現し、将来的に出現する月面情報空間では「ネットワーク知能」での活用も検討します。

研究者
-

國井 康晴
中央大学 理工学部 教授
-
新妻 実保子
中央大学 理工学部 教授
-
田口 善弘
中央大学 理工学部 教授
-
坂本 康輔
中央大学 研究開発機構 機構准教授
-
鈴木 大和
中央大学 研究開発機構 機構助教