 群収集情報の解析による進化型ネットワーク知能の制御
群収集情報の解析による進化型ネットワーク知能の制御

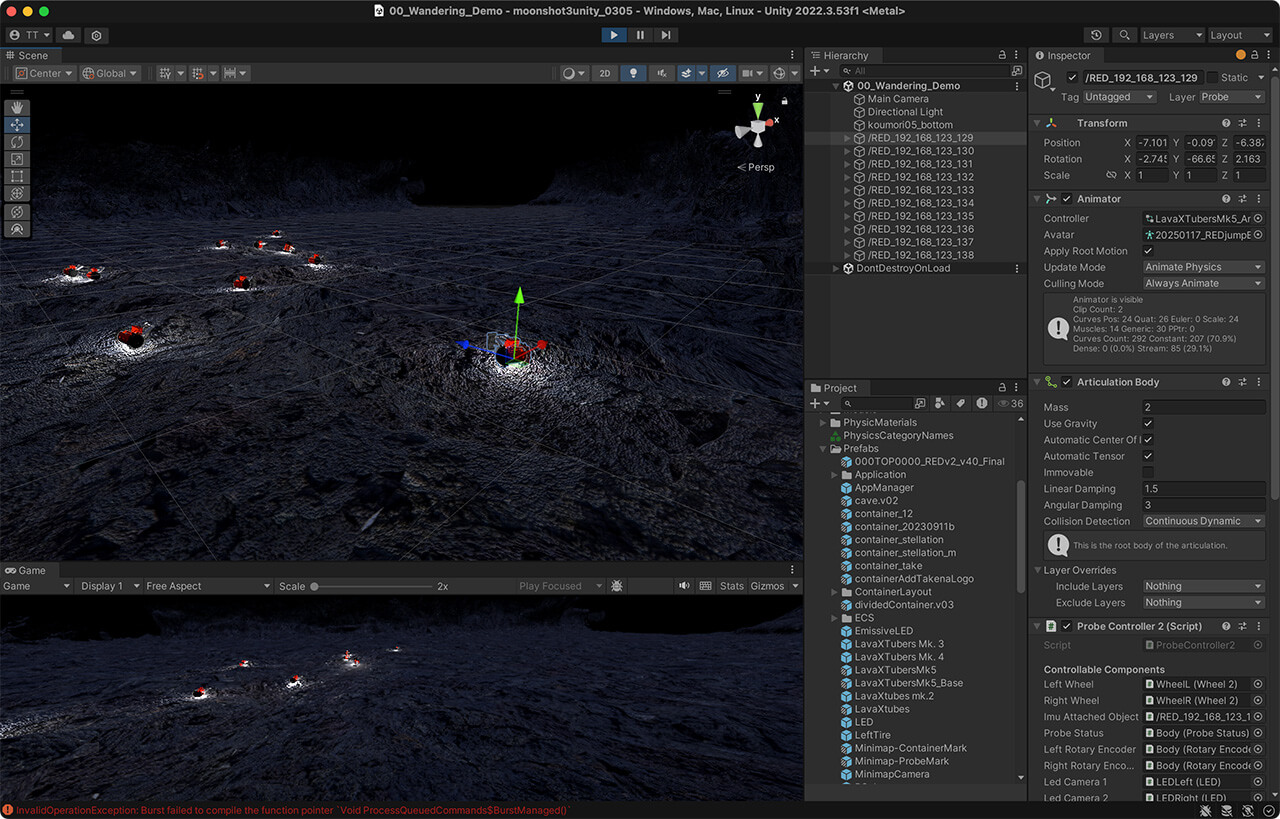
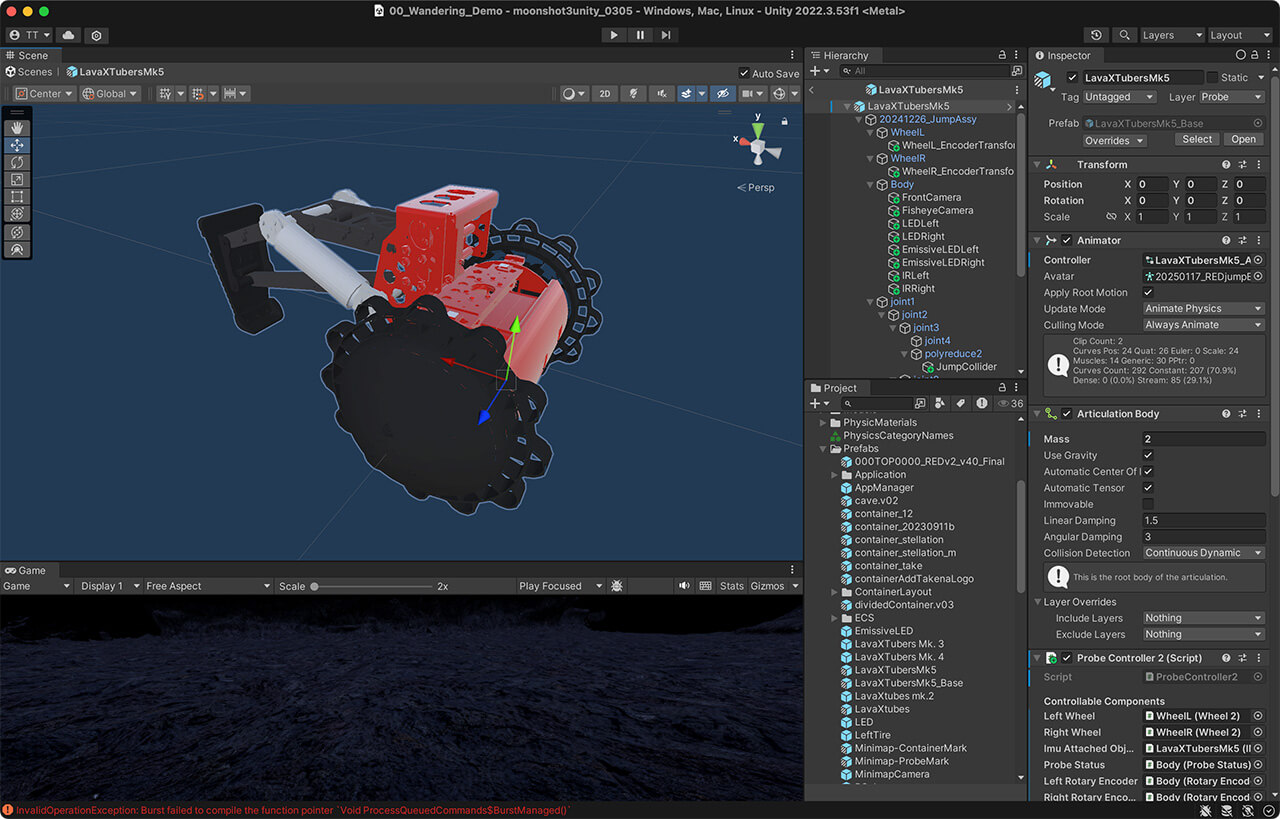
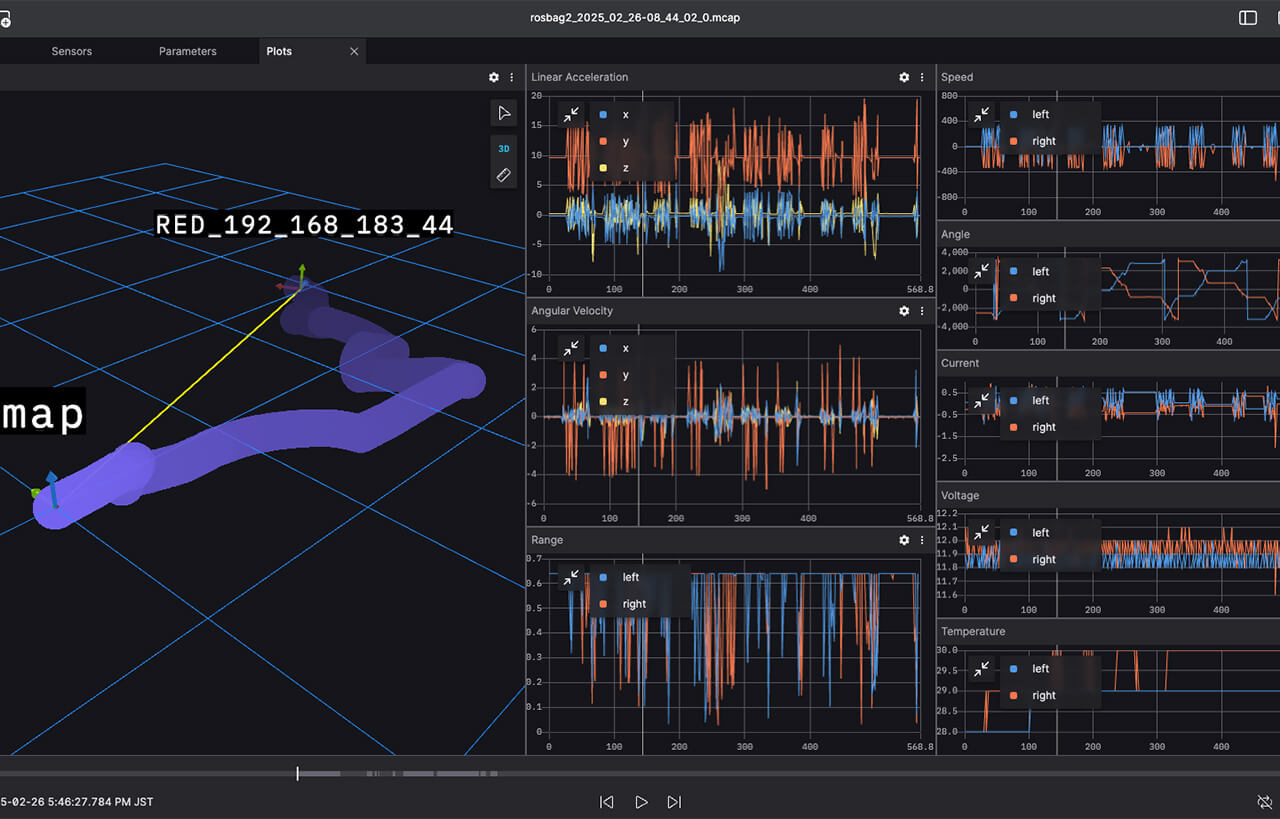
個体ロボットや群が取得する計測データや活動データを管理し、それらの解析からロボットや環境などの状態を理解できる「ネットワーク知能」を開発を進め、解析機能およびデータベース機能を構築します。
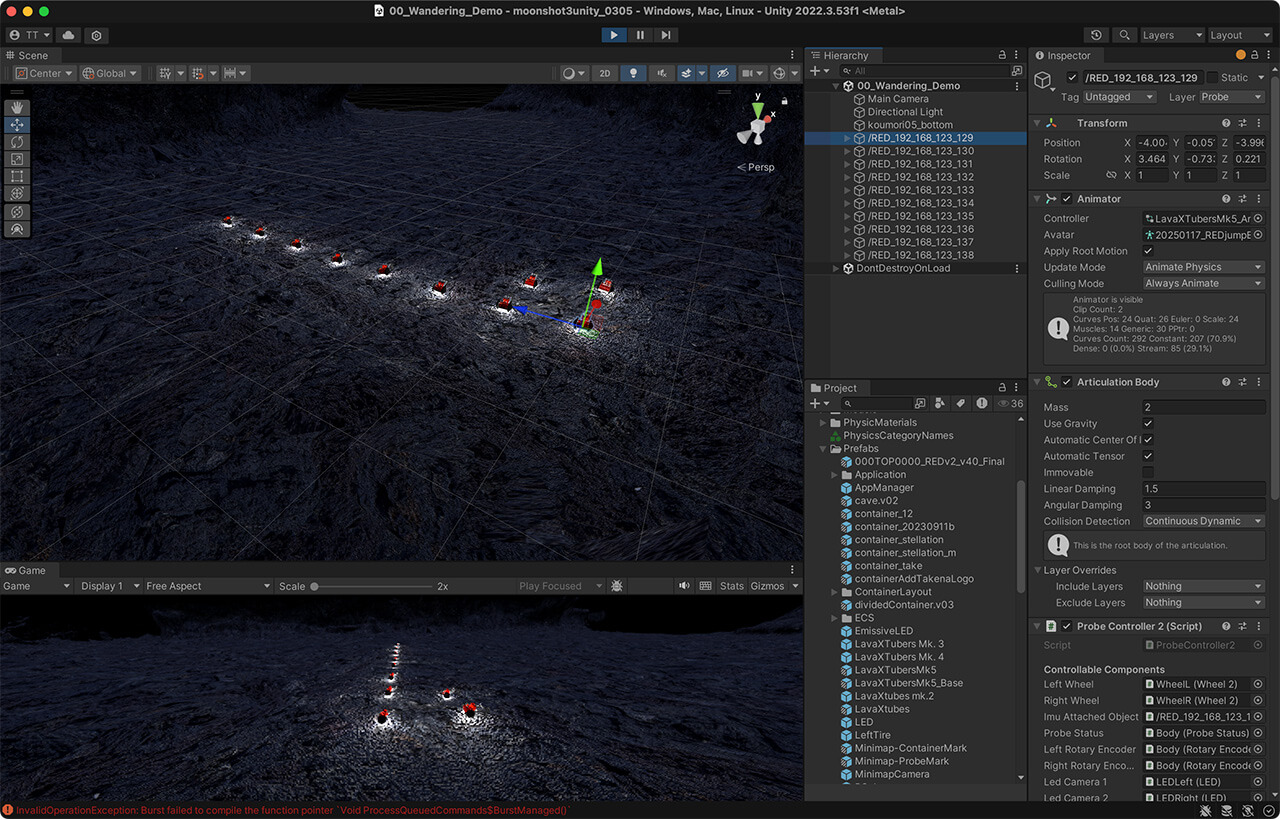
未知領域の探査では各個体ロボットと群の存在位置情報は誤差を含んだあいまいな情報です。そこで、座標情報ではなく観測地の繋がり情報を幾何学的に扱う空間情報管理手法を設計していき、群行動などで異常や危険認識などに活用できる知能化を実現します。
研究者
-

宮口 幹太
(株)竹中工務店 技術研究所 主席研究員
-
髙井 勇志
(株)竹中工務店 技術研究所 主席研究員
-
稲葉 澄
(株)竹中工務店 技術研究所 研究主任
-
井戸硲 勇樹
(株)竹中工務店 技術研究所 研究主任
-
北野 信吾
(株)竹中工務店 技術研究所 主席研究員
-
岡田 拓郎
(株)竹中工務店 技術研究所 研究主任





