進化型群ロボットの行動制御とネットワーク知能の搭載設計
進化型群ロボットの行動制御とネットワーク知能の搭載設計

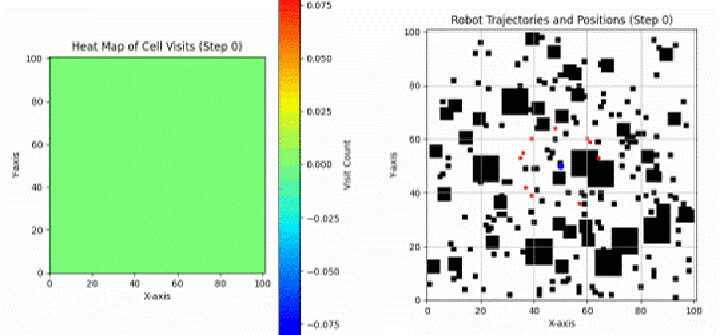
環境情報と個体の行動の記録や個体の位置制御などを行わずに、低機能な個体ロボットが自律的に群を形成する手法を検討します。空間や作業などに適切な群サイズと行動等を自律的に決定し、行動パターン変化や跳躍移動などで未知環境に対する空間探査能力や狭小空間通過能力を向上させます。
物理的に存在する実マーカ、それが複数集まり作り出される仮想マーカを移動させることで実現する、個体、単群、複数群の誘導方式および群間協調行動の誘導法を検討します。


研究者
-

國井 康晴
中央大学 理工学部 教授
-
新妻 実保子
中央大学 理工学部 教授
-
田口 善弘
中央大学 理工学部 教授
-
坂本 康輔
中央大学 研究開発機構 機構准教授
-
鈴木 大和
中央大学 研究開発機構 機構助教