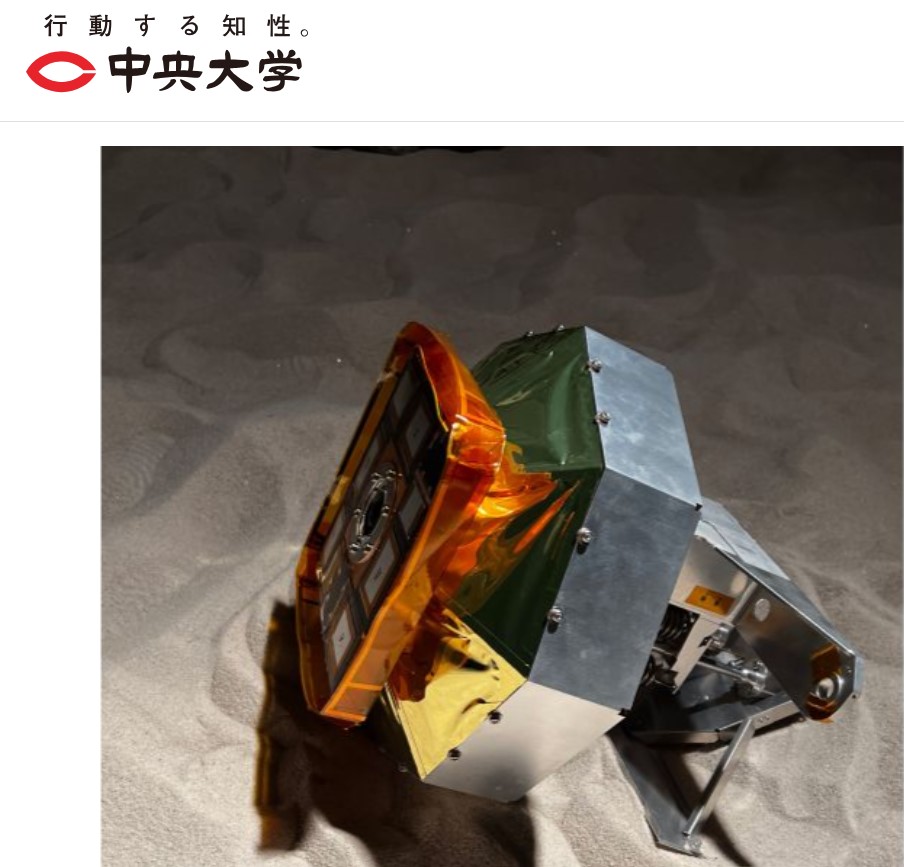
プロジェクトマネージャー 國井康晴が開発した天体観測用小型ローバ「Lunar Excursion Vehicle-1 (LEV-1)」が、2023年9月7日に月に向けて打ち上げられたH-IIAロケット(国立研究開発法人宇宙航空研究開発機構(JAXA)に搭載されています。 「LEV-1」は、H-IIAロケットと共に打ち上げられる月着陸実証機「Smart Lander for investigating Moon(SLIM)」に接続された状態から、SLIMが月面に着陸する直前に射出‧分離されます。約2Kgの機体を月面でジャンプさせながら移動し、同じくSLIMから射出され、自動で月面を走行してSLIMの着陸条件に関わるデータや月面画像を取集する「LEV-2 」と通信して、地球に直接送信するミッションを担っています。
【開発秘話】
実はこの「LEV-1」の姉妹機が、私達が現在研究開発を進めている小型跳躍移動ロボット「RED」のなのです。もともとは「LEV」も「RED」もSLIM搭載機のデザインの一つでした。搭載できる重量が極限まで削られる中、究極に機能を絞り込んだ機体である「LEV」が採用され、「RED」はボツに・・・しかし将来のために「RED」の開発は続けられ、本ムーンショットのプロジェクトに継承されています。
【2023/9/7 打ち上げ成功】理工学部教授 國井康晴らが開発した天体観測機「LEV-1」を月に向かうH-IIAロケットに搭載